
The goal so far with body construction has been sand and prime the outer shell and move on. I intend to do a final patch sand and paint job at the end of the project after all the equipment has been fitted inside.
At first I thought the head as too big but I have checked it against hero prop shots and the original plans and it's not. The production designers actually made the head bigger in later versions of the prop. A fact I picked up while researching what I thought was a problem. It's a good thing it's big too because it needs to hold animatronics for its ears and nose and a thermal printer. I have also decided to move the raspberry PI and external speakers into the head as well to shorten the distance between it and the camera. The head will probably be more complex than the entire body.
Now let's talk about construction. I started by gluing the bottom plate to the sides and then gluing a cross brace at the brow and the back of the head.


Here is a shot looking down into the head from the top showing the bottom cross brace. This was after the brow cross brace and neck mount were inserted.
It is defiantly at an angle. His was because I adjusted it to try and change the shape of the head because it was a little mis-shapen without cross braces to hold it in place. Also shown here is a cross brace in the back of the head to allow the curved plate of wood in the back to be bent around it.
The back plate had an almost circular curve to it. This is not easy to do with wood. I was thinking of using water to soften it but decided to score the back of it every inch and a half to make it more pliable.

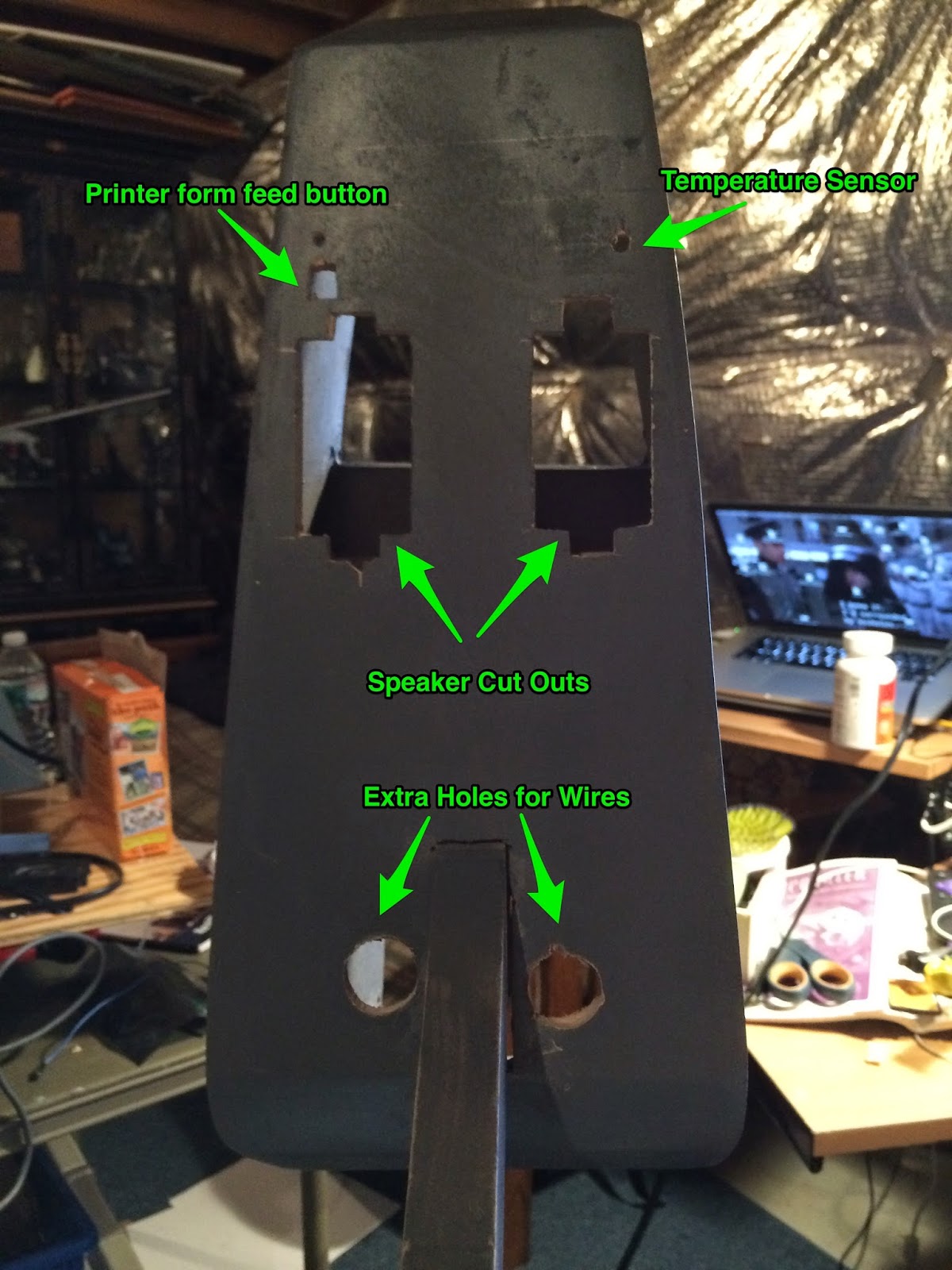
This left only the top of the nose and the head without wood. These will form the removable access doors. I will also have to cut additional compartments for speakers, printer controls and a temperature sensor. They are all going to be mounted on the underside as shown below.
I have fitted the head into place on the body to get a better idea how I am going to permanently mount it. During this process I discovered that once the head was installed, I could not longer use the remote control to move the robot forward. Its front mounted ultrasonic range finders kept reporting that there was an object about 8cm in front of it and it would not allow me to move it forward no matter what I did. I assumed that I had damaged the sensor while installing the head so I removed it.
Once I removed it, I could now move it by remote control. Unfortunately, without this sensor to stop it, once I started testing it, it ran out of control and broke its neck, causing the head to sag but not come completely off. This is not my first setback during this project but it was the worst since the fire in the dorsal light control board. It was after this accident that I realize that the ultrasonic range sensor was detecting the robots own head as an obstacle. Once I moved the head up and out of the way, the range finder began working again. Pity I had to remove it and bench test it to find this out. I should have realized it when the problem first began.
Well this entry probably ran on too long so I will end it with a shot of K9 with his head (before it got broken) sitting next to Appa, the beagle. Next time I will talk about installing equipment into the newly build head.

I have fitted the head into place on the body to get a better idea how I am going to permanently mount it. During this process I discovered that once the head was installed, I could not longer use the remote control to move the robot forward. Its front mounted ultrasonic range finders kept reporting that there was an object about 8cm in front of it and it would not allow me to move it forward no matter what I did. I assumed that I had damaged the sensor while installing the head so I removed it.
Once I removed it, I could now move it by remote control. Unfortunately, without this sensor to stop it, once I started testing it, it ran out of control and broke its neck, causing the head to sag but not come completely off. This is not my first setback during this project but it was the worst since the fire in the dorsal light control board. It was after this accident that I realize that the ultrasonic range sensor was detecting the robots own head as an obstacle. Once I moved the head up and out of the way, the range finder began working again. Pity I had to remove it and bench test it to find this out. I should have realized it when the problem first began.
Well this entry probably ran on too long so I will end it with a shot of K9 with his head (before it got broken) sitting next to Appa, the beagle. Next time I will talk about installing equipment into the newly build head.