
Where possible, I try to include what resources they will use in terms of ports or pins and nothing is connected directly to the PI's GPIO as of yet. This may become necessary if USB access for sensor data is too slow.
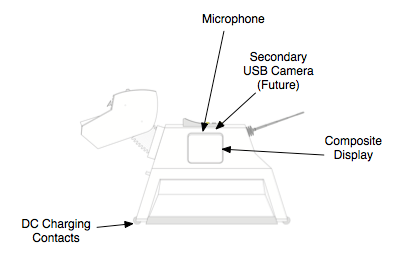
So where on the actual shell will these systems be located? Here are some callouts that will give you a general idea.

LEFT SIDE
RIGHT SIDE

FRONT/REAR
I have already constructed some of these peripherals including the dorsal control panel and LCD display which will need to have a post all its own when it is completed. Here is a short video showing it performing one of its first self tests.
Keep in mind that the surface of this piece has only been primed and will not show the rough line marks that a visible now when it is completed. Here you can see the display light individual lights by generating powers of 2^n as integers. It is capable of lighting any combination of the twenty four lights simultaneously. Once the switches are wired into the Arduino, I will be able to use them to interact with menus displayed on the LCD screen.
There is already as small body of Arduino sketch and python code which controls this control panel and I have been thinking about putting this on GitHub in the near future. I will also start including parts lists and diagrams which are probably to detailed to post in my blog in case anyone gets the idea to try this project themselves in the future.
1 comment:
The Razor Scooter brand has gained amass following since its launch in the year 2000. It has established a good reputation for producing high quality and innovative scooter designs. The first Razor electric scooter was introduced in 2003 and over the years, the brand has been releasing the best models in the market.
https://buyelectricscooternow.com/best-razor-electric-scooter/
Post a Comment